
Learning Task Requirements and Agent Capabilities for Multi-agent Task Allocation
Student: Bo Fu
This work develops a learning framework to estimate agent capabilities and task requirements for multi-robot task allocation, where the learned capabilities and requirements can be embedded as constraints in many existing optimization-based task allocation models.
[1] B. Fu, W. Smith, D. Rizzo, M. Castanier, M. Ghaffari, and K. Barton, “Learning Task Requirements and Agent Capabilities for Multi-agent Task Allocation,” 2022. [Preprint] [Code] [Website]
Fleet Organization in Heterogeneous Vehicle Teams to Meet Task Requirements in Uncertain Environments
Student: Bo Fu
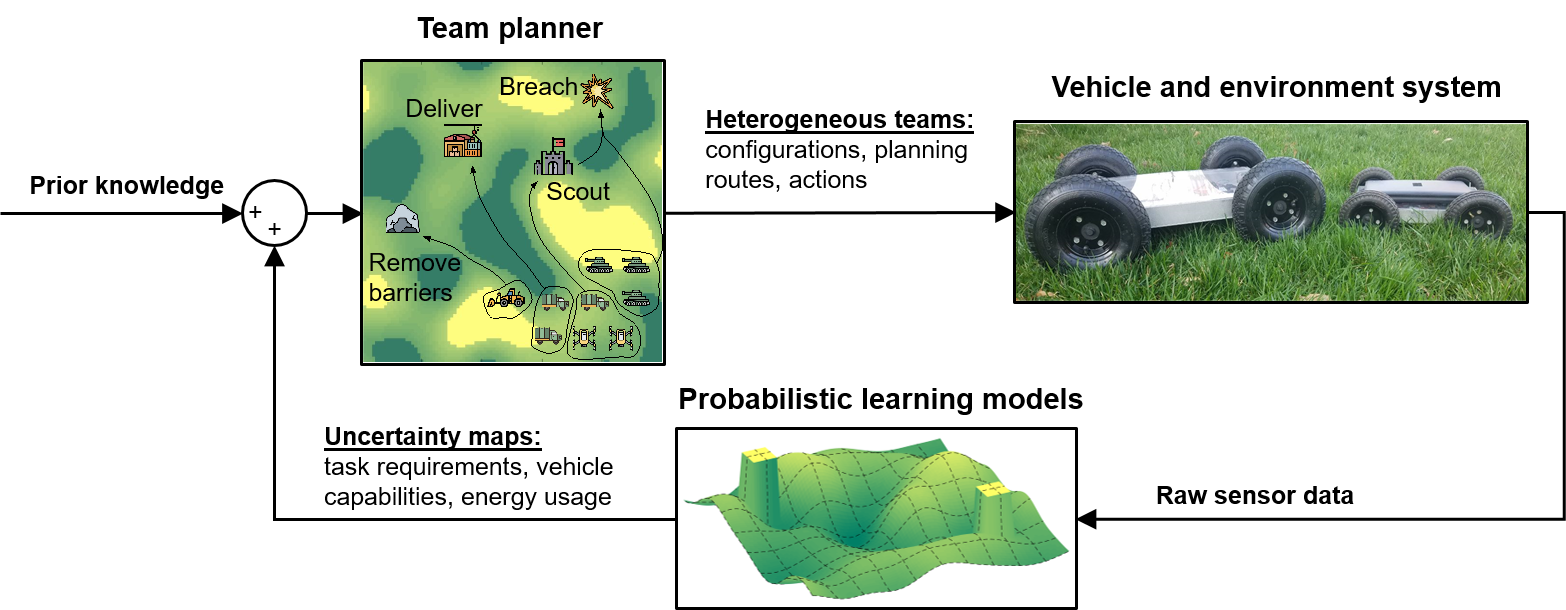
The progress in multi-robot decision-making algorithms and robotic sensing and control allows robot teams to work together to complete missions. Despite the achievements made by these decision-making frameworks, most of them are applied to a team of homogeneous robots for one specific task and require a structured known environment. As robotic systems operate on more complex missions, it is essential to consider uncertainty in the environment and the heterogeneity of the robots and tasks. This project aims to develop a general feedback teaming framework that dynamically characterizes the heterogeneities and uncertainties in agent and task states and configures robust teams and schedules.
[1] “Heterogeneous vehicle routing and teaming with Gaussian distributed energy uncertainty,” IROS, 2020. [PDF]
[2] “Robust task scheduling for heterogeneous robot teams under capability uncertainty,” IEEE Transactions on Robotics, 2022. [PDF] [Code] [Website]
Fleet Organization in Heterogeneous Vehicle Teams to Meet Task Requirements in Uncertain Environments
Students: Bo Fu, Tribhi Kathuria
This project develops a centralized framework for multi-robot tour guidance in a partially known environment. A mixed-integer optimization simultaneously matches humans with the correct robot and generates the routes for the robots to maximize the coverage of requested places to visit. The scalability and optimality of the framework are demonstrated through computational evaluation (largest case tested: 50 robots, 250 humans, and 50 places). A photo-realistic simulation was developed to verify the tour guiding performance in an uncertain indoor environment.
[1] “Simultaneous human-robot matching and routing for multi-robot tour guiding under time uncertainty,” Journal of Autonomous Vehicles and Systems, 2021. [PDF] [Code] [Website]
