Bo Fu, William Smith, Denise Rizzo, Matthew Castanier, Maani Ghaffari, Kira Barton
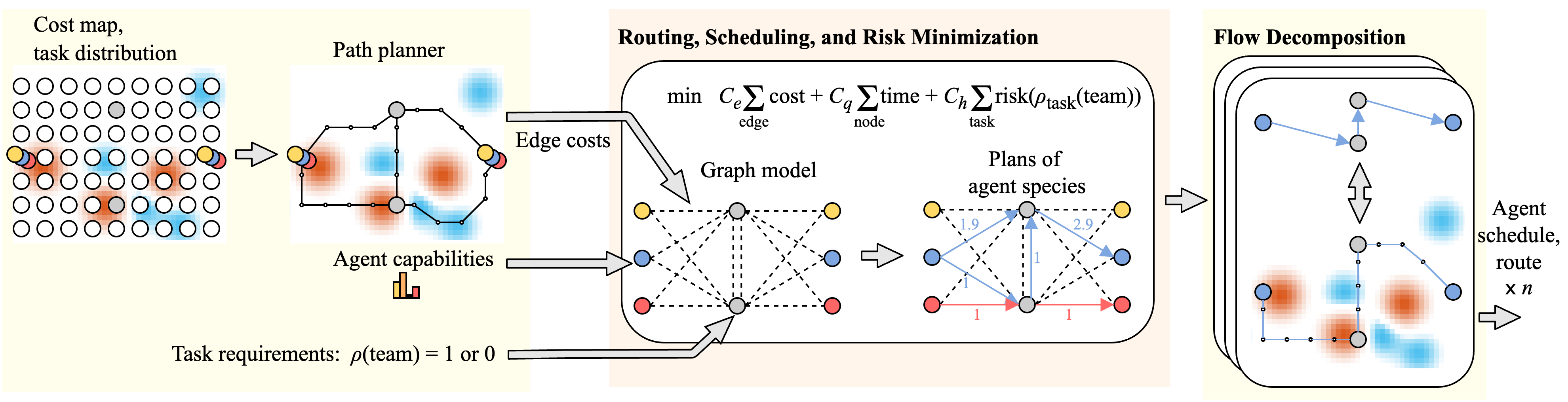
This paper develops a stochastic programming framework for multi-agent systems where task decomposition, assignment, and scheduling problems are simultaneously optimized. The framework can be applied to heterogeneous mobile robot teams with distributed sub-tasks. Examples include pandemic robotic service coordination, explore and rescue, and delivery systems with heterogeneous vehicles.