
Modeling Electrohydrodynamic Jet (e-jet) Printing for Micro/Nanoscale Topography Control
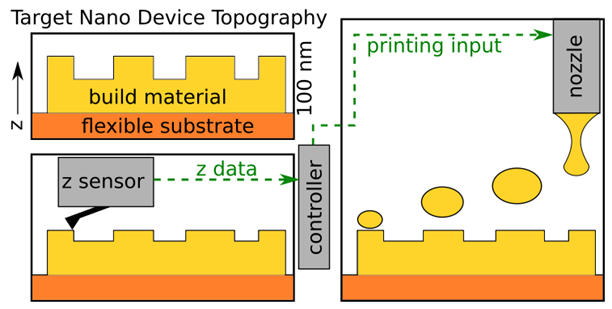
This project is focused on developing and validating physics-based models of the micro/nanoscale topography produced by e-jet printing. These models must be accurate yet simple enough for use in micro/nanoscale topography control. The project is developed using a custom-built testbed composed of a precision motion control system for printing, atomic force microscope (AFM) sensor for 3-D scanning, a high-speed optical microscope for 2-D imaging. Design, identification, and iterative learning control of hybrid system models for mechatronics
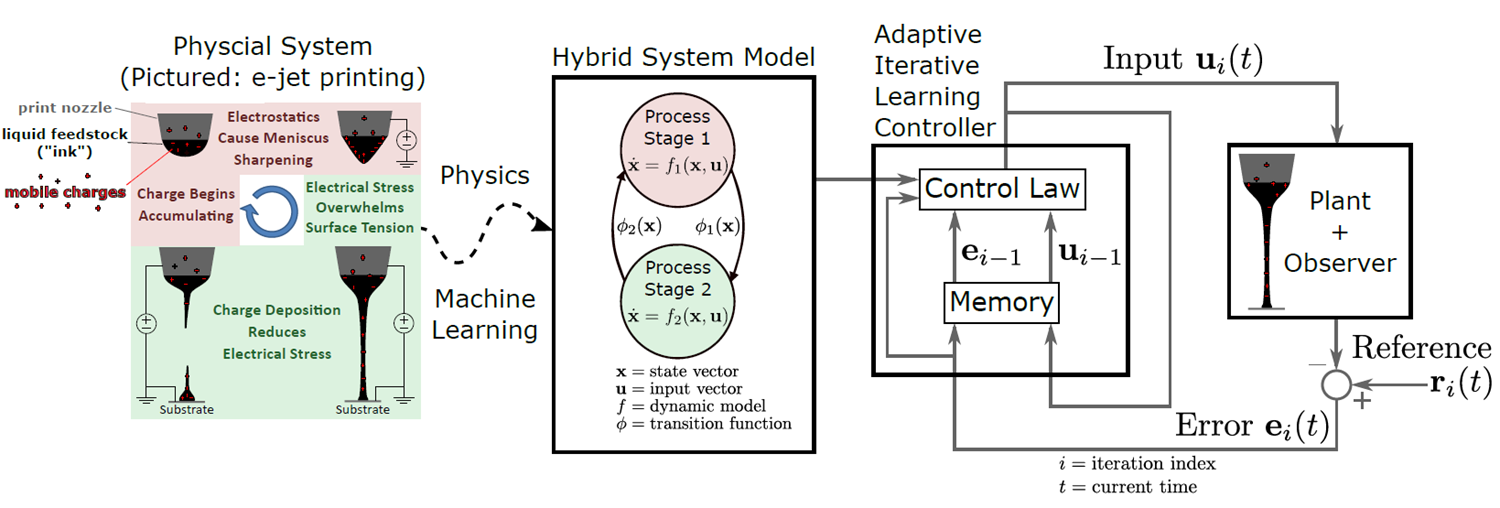
This research seeks to achieve control and/or improve controller performance of physically complicated processes by modeling them as hybrid dynamical systems and by deriving adaptive iterative learning control (AILC) frameworks for these models. The modeling objective of this work is to capture a system’s important dynamics in a manner mathematically compact enough to serve as a practical foundation for control design. Hybrid systems theory facilitates the fulfillment of this objective by enabling the combination of first-principles physics when possible and data-driven modeling when necessary by describing the end-to-end process dynamics through a set of component models. Physics-Based Printhead Design for Enhancing Electrohydrodynamics Jet printing
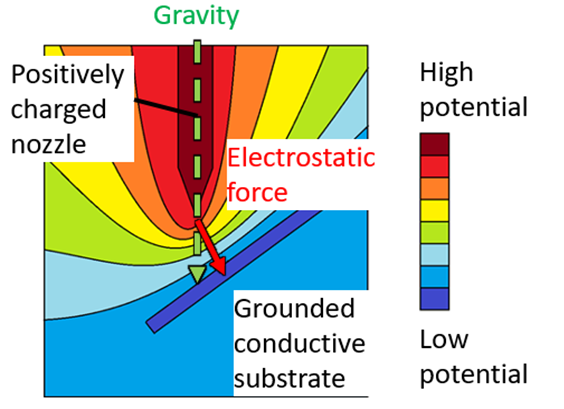
The research in this project aims to investigate the basic physics behind the electric-field driven ink meniscus to aid in the development of new E-jet printhead designs and printing approaches to overcome the substrate limitation. Some of the main challenges in e-jet printing addressed in this project are the low throughput due to challenges with multi-nozzle printing accuracy, lack of integrated sensing and control, and substrate constraints due to process sensitivity to offset height variations.
Modeling and Control of E-Jet Printing as a Repetitive Process
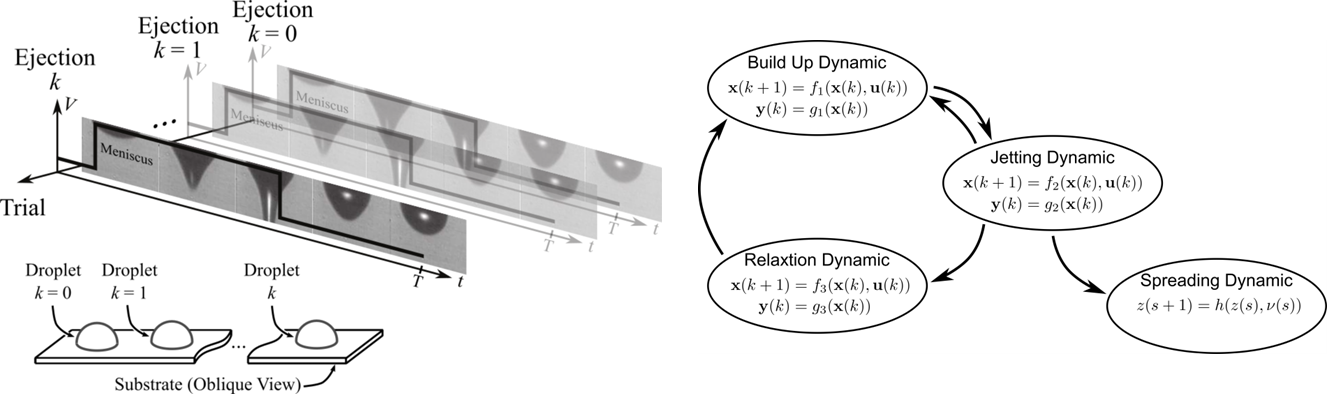
Electrohydrodynamic jet (e-jet) printing is a micro-/nano-scale additive manufacturing process. During builds, a voltage source is used to induce ink ejections that result in picoliter-sized droplets. Because of the time and length scales over which e-jet operates, and the complex physics which govern it, real-time model-based control is infeasible. In order to enable methods for improving printing performance, models which are capable of describing system trajectories holistically, while remaining useful for control design, are needed. For control, a trial-to-trial paradigm can be used to circumvent the obstacles posed by delayed or low-resolution sensing. This project aims to develop hybrid models of the E-jet printing process, and repetitive process control methods to leverage those models, to improve printing repeatability and accuracy.