
Marine Mammal Monitoring and Analysis through Controlled and Uncontrolled Agent Coordination
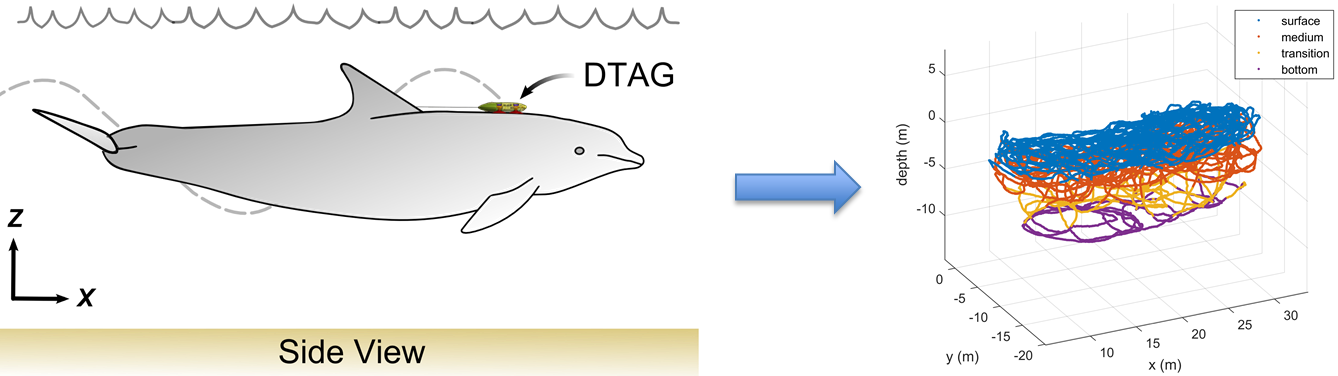
This research concerns marine mammal localization, behavior analysis, and environment reconstruction, through the use of coordinated autonomous oceanic vehicles. This will involve developing a generalized control framework to allow for the cooperation of uncontrolled and controlled agents, and applying the framework in the specific case of tagged dolphin monitoring. Currently, the research is in the Localization phase of the project and is leveraging the Robotics techniques of automatic computer vision detection and pose-graph localization in tracking tagged bottlenose dolphins.
EMG-based Prediction of Lifted Loads
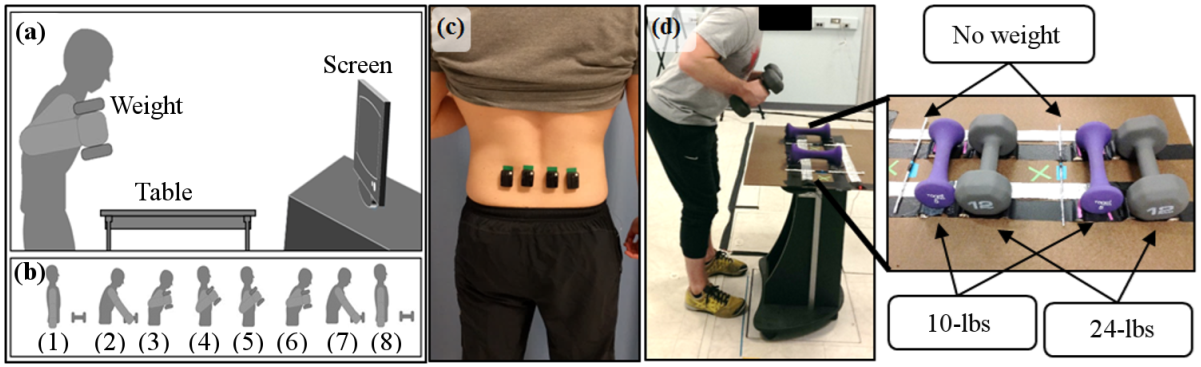
With advancements in human-machine interfaces for wearable assistive devices, early detection of human-intent is important for ensuring prompt controller response and minimal actuation delays. This project uses feature selection and machine learning to predict lifted loads prior to lift-onset from low back muscle activity signals. This classification of early activity in EMG signals allows the implementation of feed-forward controller to preemptively assists a user with a lifting task.
A Human-in-the-Loop Control Framework for Optimizing Customized Assistive Devices
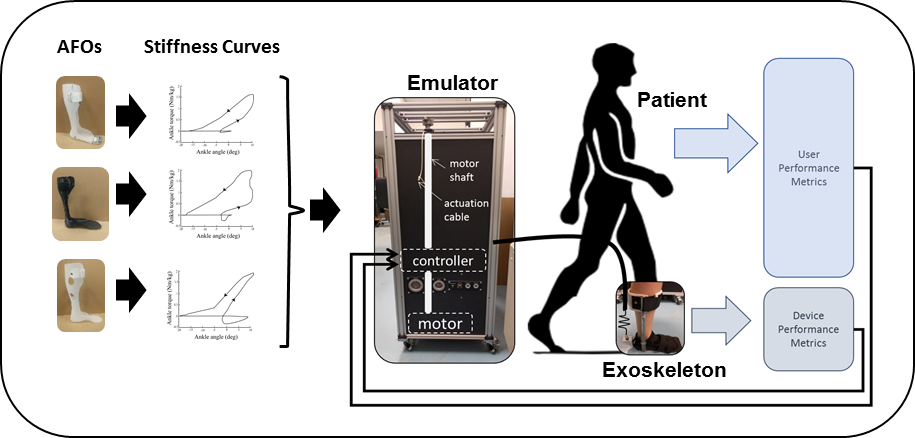
Advancements in additive manufacturing are enabling more customizable device designs and opening up the design space like never before for assistive technologies for individuals with disabilities. However, standards for objective measures of evaluating these technologies and their different designs are greatly lacking. We bring a human-in-the-loop design optimization approach to enhance the efficacy of and bring objectivity to the assistive device fitting process. This project focuses on the ankle-foot orthosis (AFO), which is a type of assistive brace worn on the foot and leg to improve a patient’s walking gait. The project proposes the use of real-time sensing of patient performance during the fitting process to find a customized, optimal AFO design. A lower-limb exoskeleton, with an off-board motor and controller, is used to emulate the experience of ‘trying on’ different AFO devices while a human-in-the-loop algorithm iterates between device designs and simultaneously evaluates patient performance. A virtual optimal design is selected and then translated into a physical 3-D printed AFO. The use of 3D-scans, CAD and additive manufacturing ensures a truly custom fit and the human-in-the-loop framework ensures objectively optimal performance for each unique patient.
Modeling and Control of E-Jet Printing as a Repetitive Process
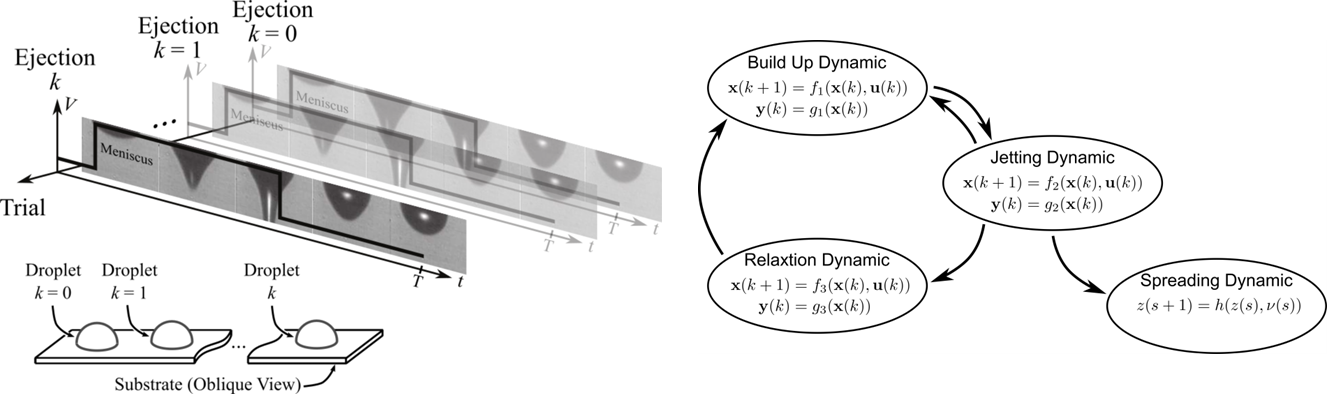
Electrohydrodynamic jet (e-jet) printing is a micro-/nano-scale additive manufacturing process. During builds, a voltage source is used to induce ink ejections that result in picoliter-sized droplets. Because of the time and length scales over which e-jet operates, and the complex physics which govern it, real-time model-based control is infeasible. In order to enable methods for improving printing performance, models which are capable of describing system trajectories holistically, while remaining useful for control design, are needed. For control, a trial-to-trial paradigm can be used to circumvent the obstacles posed by delayed or low-resolution sensing. This project aims to develop hybrid models of the E-jet printing process, and repetitive process control methods to leverage those models, to improve printing repeatability and accuracy.Robotic Terrain Mapping and Energy Prediction
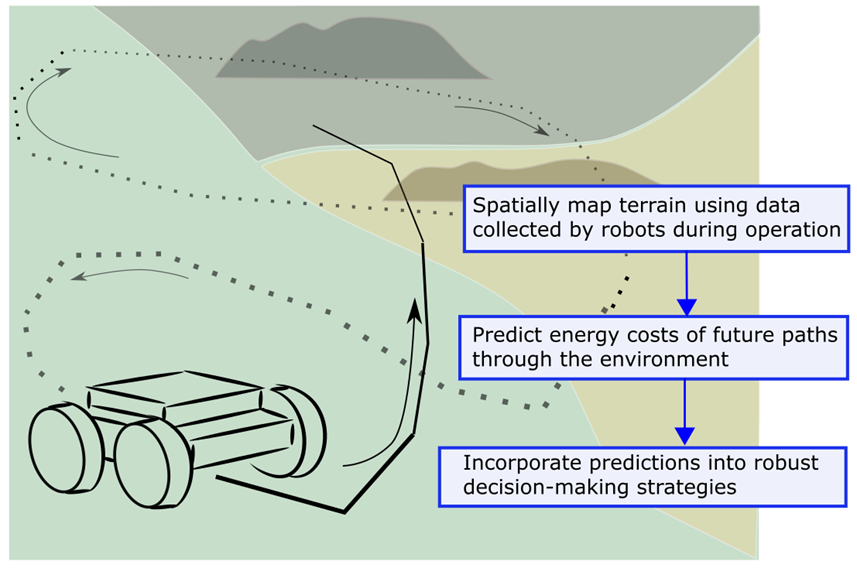
For robots operating in off-road environments, the energy cost of traversing a terrain is typically unknown and is difficult to predict. This research provides a probabilistic method for spatially mapping energy usage data collected during the operation of a ground robot. The energy cost of a new path can then be predicted based on the information collected by the robot. Energy predictions can be used to enhance situational awareness, mission planning, and autonomous decision-making through knowledge of energy usage. In particular, we utilize these predictions in a multi-robot reconnaissance application to identify reachable locations in an environment, subject to the energy resource constraints of the robots.Design, identification, and iterative learning control of hybrid system models for mechatronics
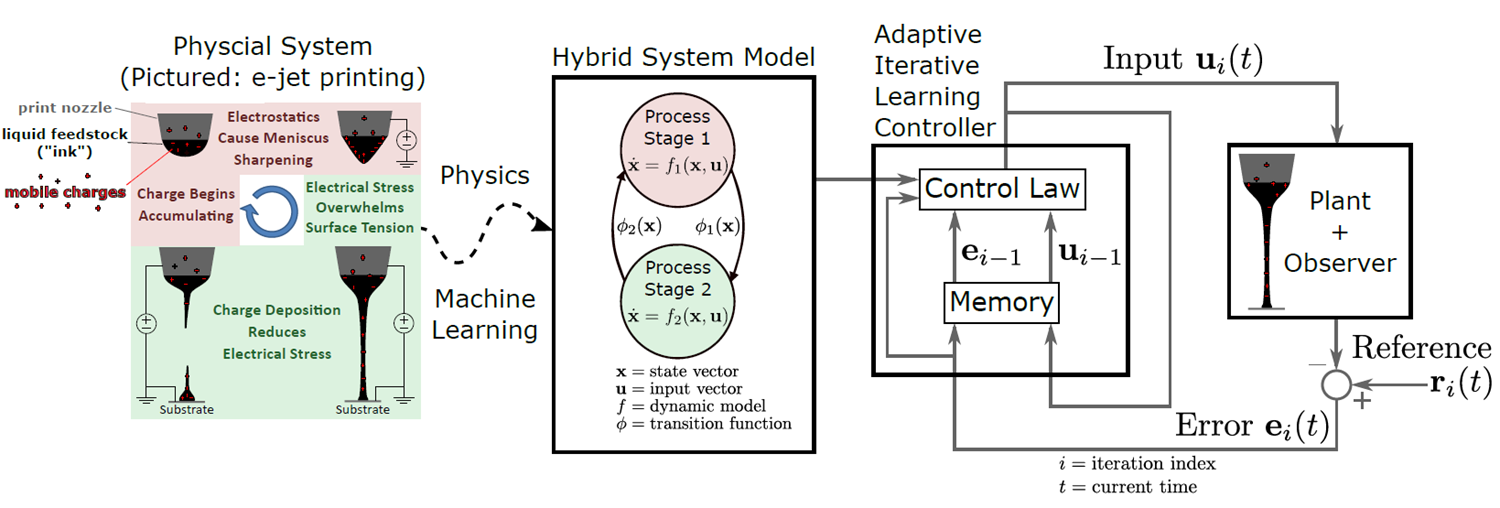
This research seeks to achieve control and/or improve controller performance of physically complicated processes by modeling them as hybrid dynamical systems and by deriving adaptive iterative learning control (AILC) frameworks for these models. The modeling objective of this work is to capture a system’s important dynamics in a manner mathematically compact enough to serve as a practical foundation for control design. Hybrid systems theory facilitates the fulfillment of this objective by enabling the combination of first-principles physics when possible and data-driven modeling when necessary by describing the end-to-end process dynamics through a set of component models.