Bo Fu, Tribhi Kathuria, Denise Rizzo, Matthew Castanier, X. Jessie Yang, Maani Ghaffari, Kira Barton
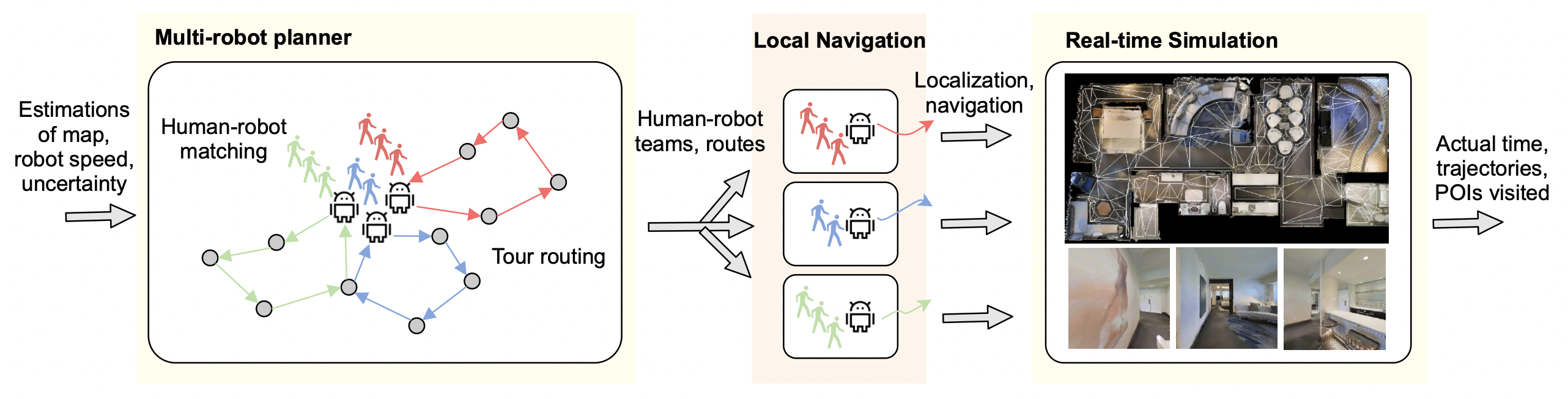
This work presents a centralized framework for multi-robot tour guidance in a partially known environment. A mixed-integer optimization simultaneously matches humans with the correct robot and generates the routes for the robots to maximize the coverage of requested places to visit. The scalability and optimality of the framework are demonstrated through computational evaluation (largest case tested: 50 robots, 250 humans, and 50 places). A photo-realistic simulation was developed to verify the tour guiding performance in an uncertain indoor environment.