
Economic Learning Control for Uncertain Repetitive Systems
Student: Maxwell Wu
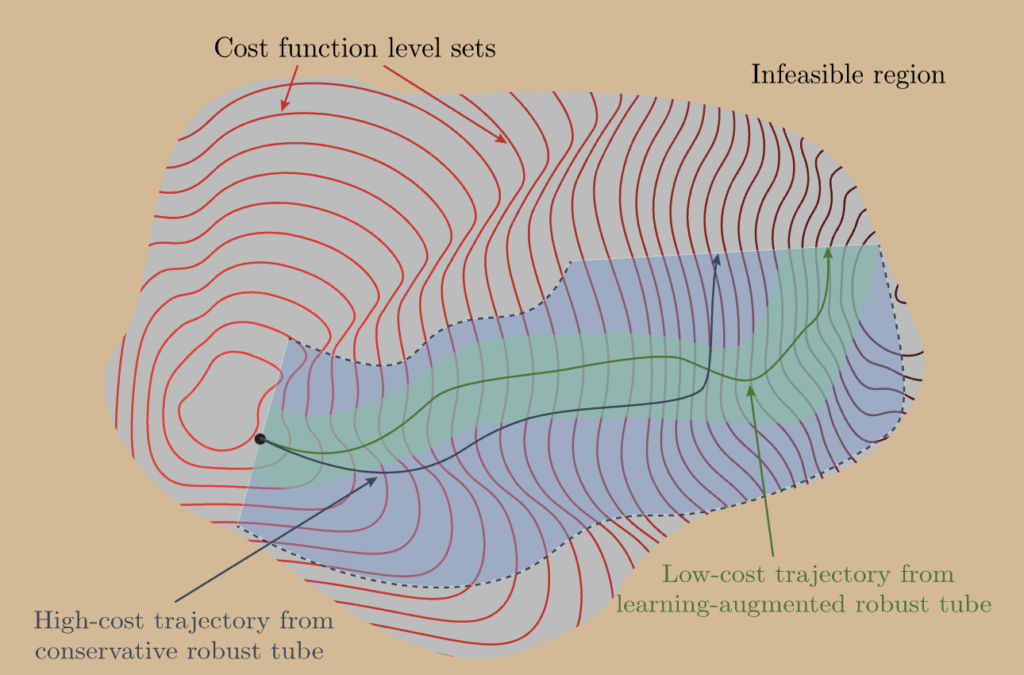
For many practical applications, an engineered system is not designed for single-use applications but is instead expected to complete the same task many times. With the advent of more complex technologies, first-principles approaches for modeling these systems may fail to adequately characterize their behavior, which limits the efficacy of incorporating these methods in purely model-based control strategies. Moreover, as the demand for increased system capability grows, traditional control metrics for evaluating performance may not adequately describe the desired system behavior.
This project then aims to develop provably safe control strategies for complex systems when only limited knowledge of the system behavior or its operating environment is available, and to demonstrate how trial-to-trial learning can improve performance by leveraging historical sensor data available from previous task executions.