
Robotic Terrain Mapping and Energy Prediction
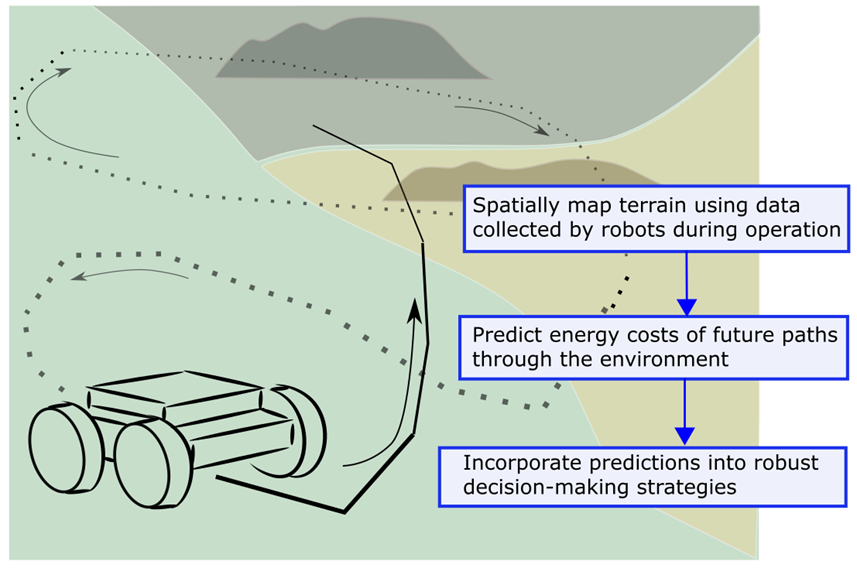
For robots operating in off-road environments, the energy cost of traversing a terrain is typically unknown and is difficult to predict. This research provides a probabilistic method for spatially mapping energy usage data collected during the operation of a ground robot. The energy cost of a new path can then be predicted based on the information collected by the robot. Energy predictions can be used to enhance situational awareness, mission planning, and autonomous decision-making through knowledge of energy usage. In particular, we utilize these predictions in a multi-robot reconnaissance application to identify reachable locations in an environment, subject to the energy resource constraints of the robots.
A Human-in-the-Loop Control Framework for Optimizing Customized Assistive Devices
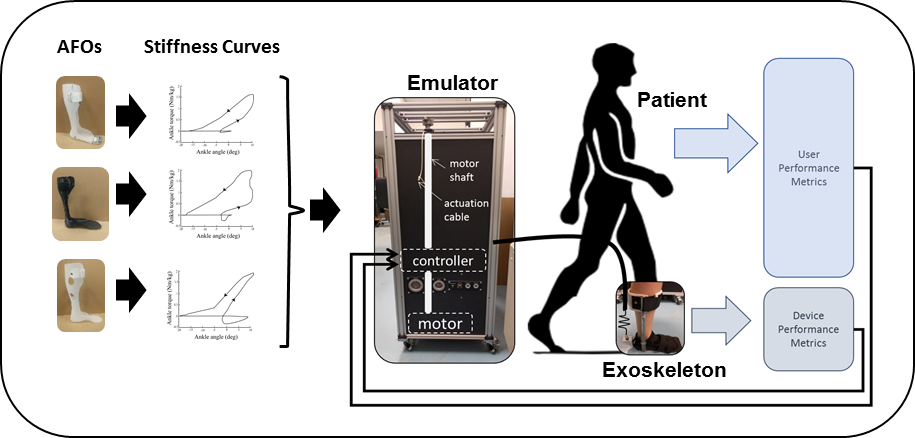
Advancements in additive manufacturing are enabling more customizable device designs and opening up the design space like never before for assistive technologies for individuals with disabilities. However, standards for objective measures of evaluating these technologies and their different designs are greatly lacking. We bring a human-in-the-loop design optimization approach to enhance the efficacy of and bring objectivity to the assistive device fitting process. This project focuses on the ankle-foot orthosis (AFO), which is a type of assistive brace worn on the foot and leg to improve a patient’s walking gait. The project proposes the use of real-time sensing of patient performance during the fitting process to find a customized, optimal AFO design. A lower-limb exoskeleton, with an off-board motor and controller, is used to emulate the experience of ‘trying on’ different AFO devices while a human-in-the-loop algorithm iterates between device designs and simultaneously evaluate patient performance. A virtual optimal design is selected and then translated into a physical 3-D printed AFO. The use of 3D-scans, CAD and additive manufacturing ensures a truly custom fit and the human-in-the-loop framework ensures objectively optimal performance for each unique patient.